Industry Geo Spatial
3D Spatial Information Using 3D Scan DATA.
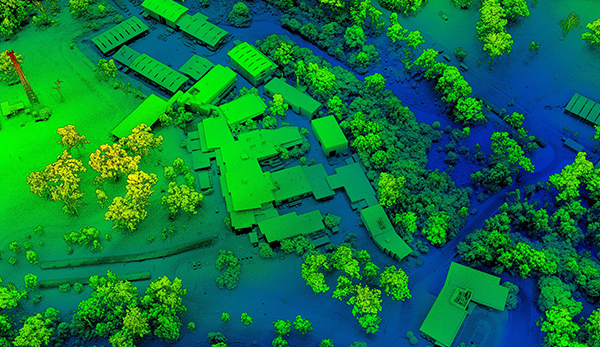
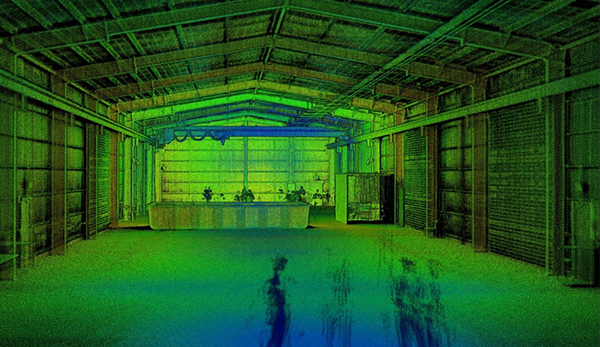
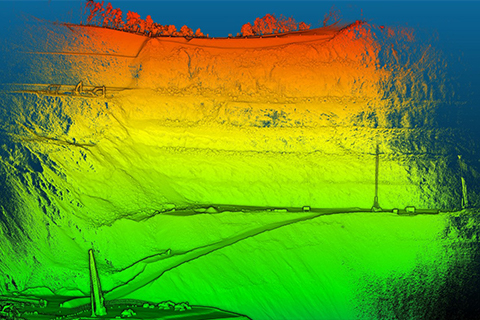
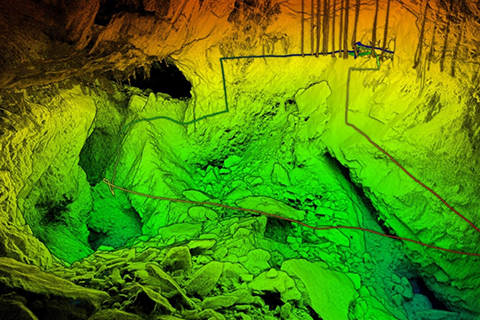
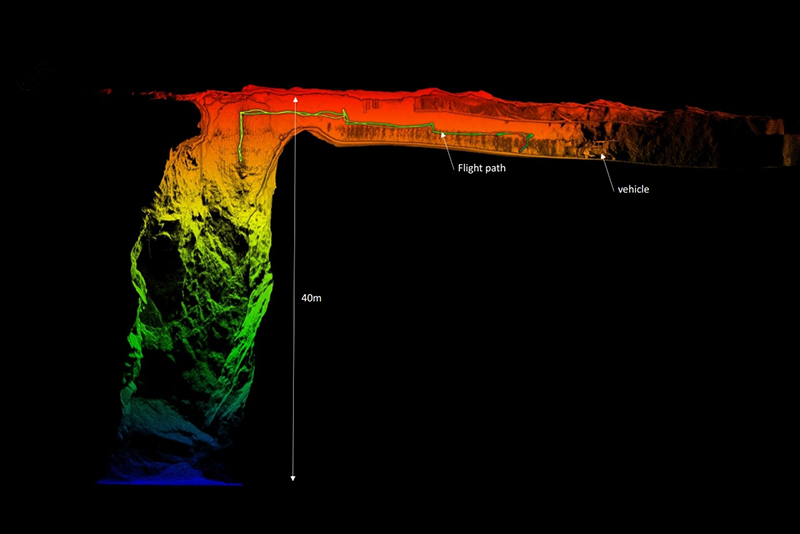
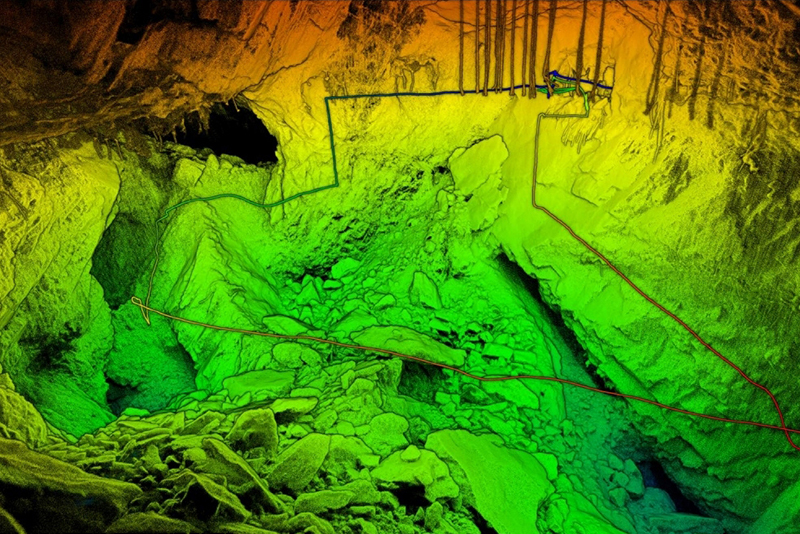
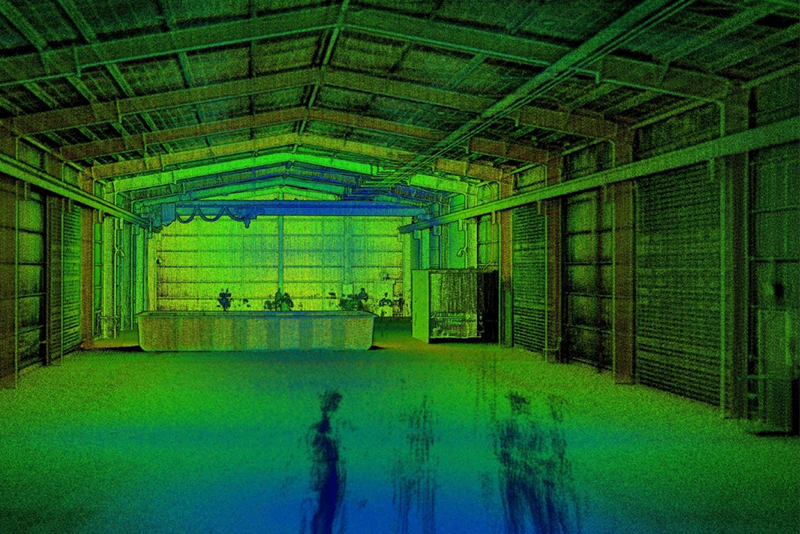
Drone UAV LiDAR 를 이용하여 넓은 지역을 보다 빠르게 SCAN 합니다.
3차원 스캔을 통한 계획/실시 도면과 현황을 비교하여 사전 현황 파악으로 물량산출, 오류, 공사기간 ,터파기 등 공사 전반에 활용이 가능합니다.
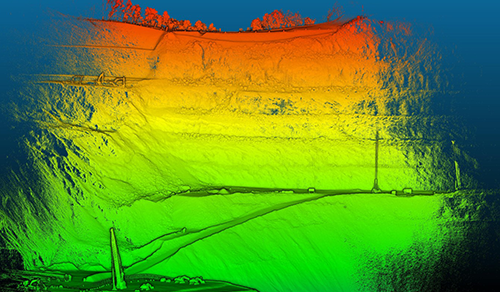
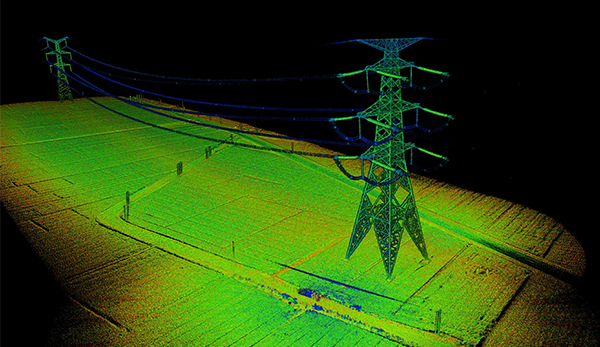
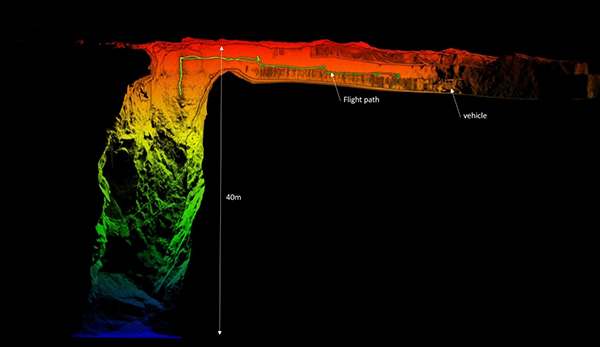
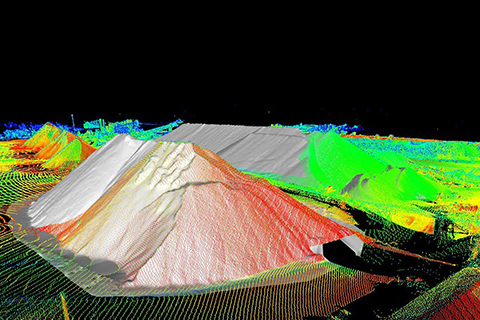
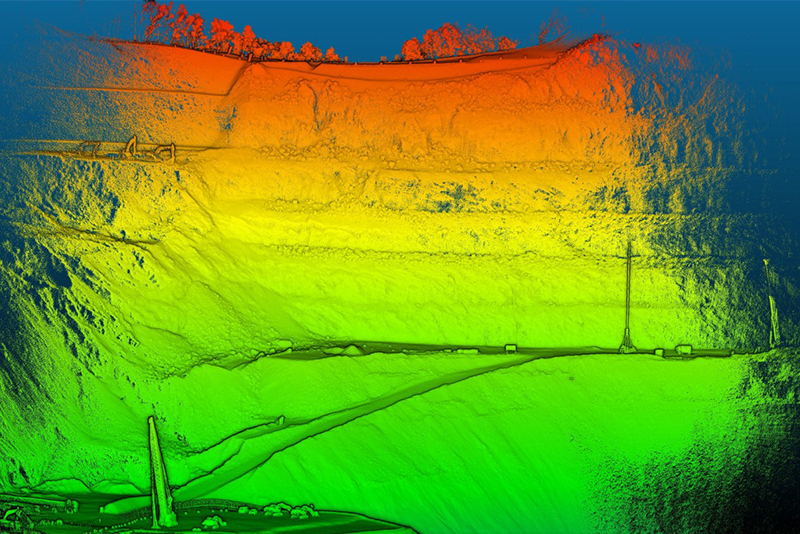
Drone UAV LiDAR 를 이용하여 넓은 지역을 보다 빠르게 SCAN 합니다.
3차원 스캔을 통한 계획/실시 도면과 현황을 비교하여 사전 현황 파악으로 물량산출, 오류, 공사기간 ,터파기 등 공사 전반에 활용이 가능합니다.